Neben dem Fliegen gibt es bekanntlich eine alternative Möglichkeit, sich zumindest kurzzeitig in die Luft zu befördern: Auch Menschen nutzen gelegentlich Sprünge, um Hindernisse zu überwinden oder etwas Hochgelegenes zu erreichen. Unsere Fähigkeiten sind dabei jedoch recht bescheiden: Der Weltrekord liegt bei 2,45 Metern bei einer Körpergröße von 1,93 Metern. In Bezug zu ihrer Körpergröße erreichen einige Tiere hingegen weit höhere Leistungen. Die besonders starke Sprungkraft von Insektenarten wie Grashüpfer und Co basiert dabei allerdings auf einem Konzept, das sich deutlich von unserem Verfahren unterscheidet.
Während der Mensch und andere größere Lebewesen spontane Muskelkontraktionen zum Springen einsetzen, bauen die Rekordspringer der Insektenwelt zunächst gespeicherte elastische Energie durch Muskelspannung auf. Durch bestimmte Mechanismen kann das Potenzial dann schlagartig freigesetzt werden, wodurch die Tiere sehr effizient in die Höhe befördert werden. Dieses Grundprinzip aus der Biologie wurde auch bereits eingesetzt, um Roboter springen zu lassen. Wie die Forscher um Elliot Hawkes von der University of California in Santa Barbara berichten, konnten sie dieses Verfahren nun allerdings auf die Spitze treiben.
Raffiniert nach oben befördert
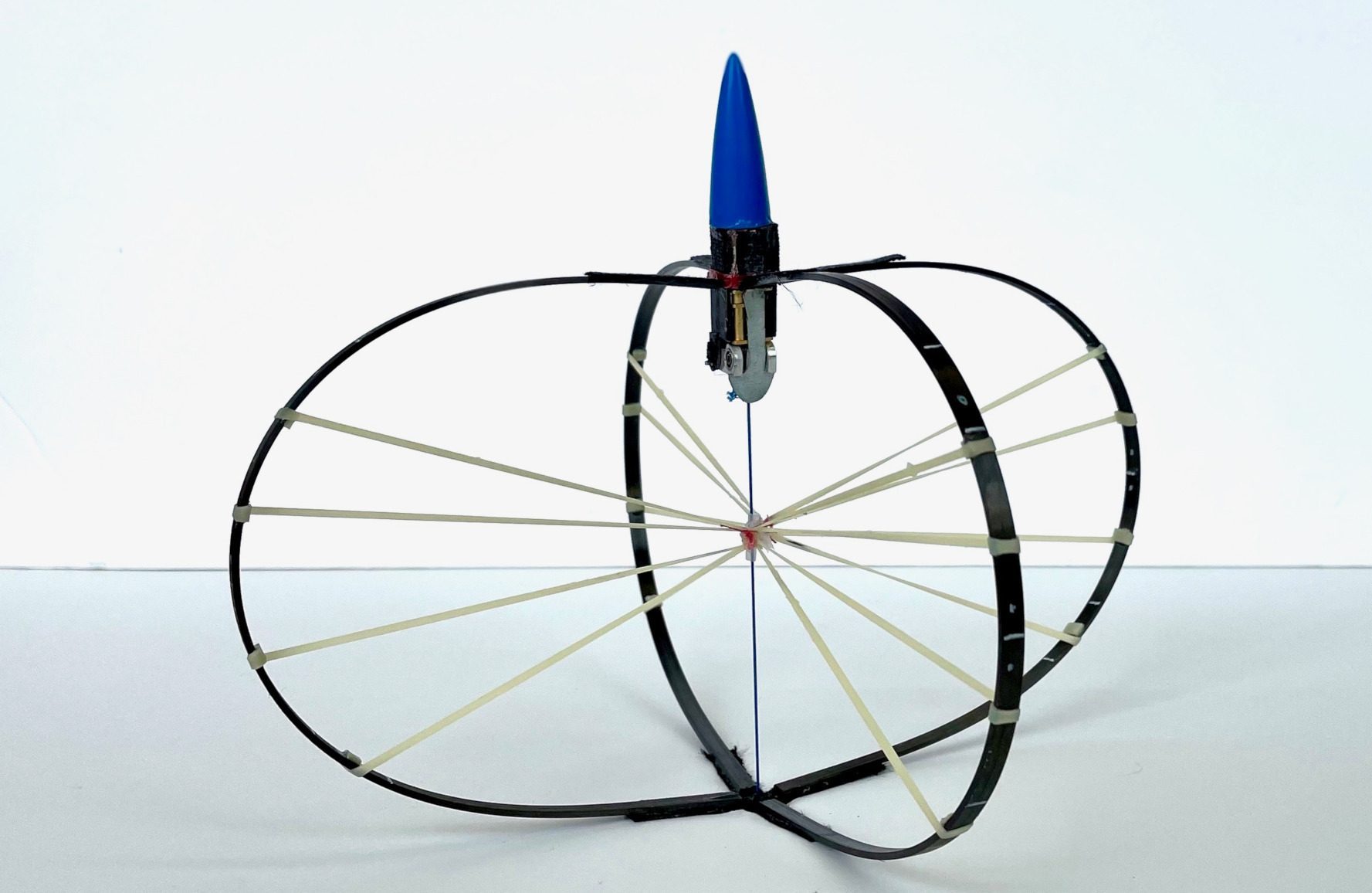
Ihr 30 Zentimeter hoher Spring-Roboter besitzt einen aerodynamisch geformten Kopf, in dem eine Batterie und ein Motor untergebracht sind. Er erzeugt bei der Anspannungsphase eine Drehbewegung, wodurch eine Schnur auf einen Zapfen aufgewickelt wird. Ihr unteres Ende ist an vier bogenförmigen Elementen aus einem elastischen Karbonfasermaterial befestigt. Während die Schnur aufgespult wird, verformen sie sich durch die Zugkraft und speichern dadurch elastische Energie. Verstärkt wird dieser Effekt zusätzlich durch Gummibänder, die wie Speichen zwischen den Bogenelementen gespannt sind. Die volle Aufladung wird erreicht, wenn ein an der Schnur befestigter Keil mit einer Verriegelung im Kopf des Roboters in Kontakt kommt und einrastet. Um den Sprung auszulösen, wird dieses Element dann geöffnet. Dabei bricht die Zugspannung des Seils augenblicklich zusammen und die in den Bogenelementen und Gummibändern gespeicherte elastische Energie wird schlagartig freigesetzt.
Wie die Forscher berichten, ging aus ihren Untersuchungsergebnissen während der Tests hervor: Der 30 Zentimeter hohe und 30 Gramm schwere Roboter saust auf eine Höhe von bis zu etwa 33 Metern. Beim Abheben erreicht er dabei eine Geschwindigkeit von mehr als 28 Metern pro Sekunde. Den Wissenschaftlern zufolge ist dies die höchste Leistung, die bisher bei technischen Springern erreicht wurde und auch biologische Systeme werden übertroffen. Manche Insekten erreichen zwar ein ähnliches Verhältnis von Körperlänge und Sprunghöhe, doch dies bleibt auf Leichtgewichte beschränkt und auch die Abhebegeschwindigkeit erreicht bei ihnen nur etwa vier Meter pro Sekunde. Mit seinen 30 Gramm ist der Roboter von Hawkes und seinen Kollegen mehr als zehnmal so schwer wie die größten springenden Lebewesen mit Konzepten von gespeicherter elastischer Energie.



